▲ 테슬라 모델3와 모델X 차량이 7월14일 미국 콜로라도주 덴버에서 열린 전기차 박람회에 등장해 시범 주로를 운행하고 있다. <연합뉴스>
특히 테슬라가 기존 방식과 달리 카메라만으로 자율주행 기술을 고도화하려는 움직임을 보여 공개일까지도 로보택시 완성도를 확신하기는 어렵다는 관측이 제기된다.
10일 블룸버그와 포브스 등 외신을 종합하면 테슬라는 로보택시 공개 예정 지역 인근에서 도로와 주변 환경에 시각 정보를 확보하는 움직임을 보이고 있다.
블룸버그는 관계자 발언을 인용해 테슬라가 로스앤젤레스에 위치한 워너브라더스 영화 스튜디오에서 10월10일 로보택시를 공개한다고 보도했다.
영화 촬영을 위해 조성된 다양한 세트장을 배경으로 로보택시 차량을 선보이려는 의도로 풀이된다.
하지만 IT전문매체 더버지는 테슬라가 행사 장소에서 미리 주행 데이터를 수집하고 있다는 사실이 그동안 펼쳤던 주장과는 거리가 있어 기술력에 관한 의구심을 자아낸다고 지적했다.
테슬라는 자체 주행보조 프로그램인 FSD(Full-Self Driving)가 카메라를 통한 시각 정보에 기반해 실시간으로 주변 도로 환경에 대응할 수 있다는 점을 기술적 차별화 요소로 내세우고 있었다.
기술이 완성되면 지리적 제한에 구애받지 않고 어떤 조건에서든, 어디서든 운행할 수 있는 진정한 의미의 자율주행을 구현할 수 있다는 것이다. 로보택시 기술 기반도 이 FSD가 될 것으로 예상됐다.
이와 달리 구글 아래 웨이모를 비롯해 로보택시 경쟁사들은 ‘라이다’ 센서와 지도 데이터를 활용해 제한된 구역에서 자율주행을 구현하는 식으로 테슬라와 다른 방식을 채택했다.
라이다는 전파를 사용해서 물체를 감지하고 크기와 거리를 측정하는 센서다.
그런데 테슬라가 영화 세트장 지형 정보를 로보택시 시연 차량에 입력해서 이에 따라 주행한다면 오히려 경쟁사들의 방식을 벤치마킹하는 움직임을 보이는 모양새가 된다.
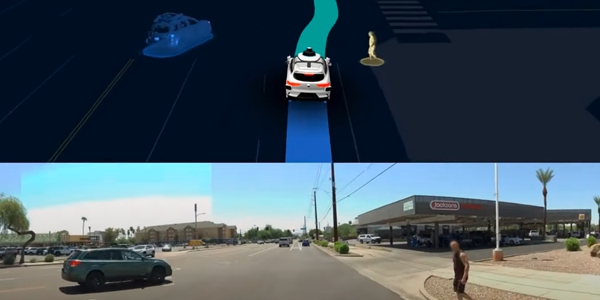
▲ 구글 웨이모 차량이 일반 도로를 주행하면서 주변 사물과 보행자를 어떻게 인식하는지를 보여주는 참고용 이미지. 공식 유튜브 영상에서 갈부리했다. <웨이모>
물론 로보택시가 가지는 중요성을 고려하면 완벽한 시연을 위한 대비로 해석할 수도 있다.
그러나 더버지는 “카메라에만 의존하는 테슬라의 자율주행 접근 방식에는 허점이 있다”라고 지적했다.
경제전문지 포브스 또한 자율주행 사고 데이터를 다룬 최근 기사를 통해 “모든 자율주행 기업이 안전 통계를 긍정적인 방향으로 제시하고 싶어 하지만 테슬라는 오해의 소지를 부를 숫자들을 발표하곤 한다”라고 꼬집었다.
테슬라 자율주행 기술력 검증에 객관성이 더 필요하다는 점을 꼬집은 것으로 풀이된다.
테슬라에게 로보택시 시연 성공 여부는 향후 성장성을 좌우할 중요한 이슈다. 테슬라가 차량 판매를 넘어 플랫폼 기업으로 성장할 수 있을지 가늠할 수 있는 계기가 될 수 있어서다.
일론 머스크 테슬라 최고경영자(CEO) 또한 자율주행과 인공지능(AI)에 우선순위를 두고 있다고 꾸준히 언급해 왔다.
이런 상황에서 로보택시 기술력이 일정 수준에 도달하지 못했을 수 있다는 지적이 나온 셈이다.
테슬라 로보택시가 먼저 상업화에 성공한 구글 아래 웨이모와 경쟁에서 밀릴 것이라는 전망이 우세하다.
웨이모가 이미 로스앤젤레스와 텍사스주 오스틴 등지에서 주당 10만 회 이상의 유료 승차를 달성할 정도로 성과를 내고 있기 때문이다.
반면 테슬라는 10월10일 로보택시를 공개한다 하더라도 바로 상업화에 나서기는 어려울 것으로 보인다. 지방자치단체에서 무인차량 주행 승인 절차를 획득하는 시간만 최소 수개월이 필요하다.
야후파이낸스의 보도에 따르면 테슬라는 캘리포니아주에서 아직도 무인 자율주행 차량을 시험 주행할 주 허가를 받지 못했다.
결국 테슬라가 한 달 앞으로 다가온 로보택시 공개 예정일까지 시장 기대감을 충족시킬 기술력을 완성해낼 수 있을지가 미지수인 상황이다.
증권사 모간스탠리는 테슬라와 관련한 투자 보고서를 통해 “투자자들은 로보택시 공개일에 쏠리는 기대감을 잘 관리할 필요가 있다”라고 전했다. 이근호 기자